PID control is a crucial technique in industrial automation that adjusts inputs based on sensor feedback to optimize performance in automation systems.
PID Controller Fundamentals:
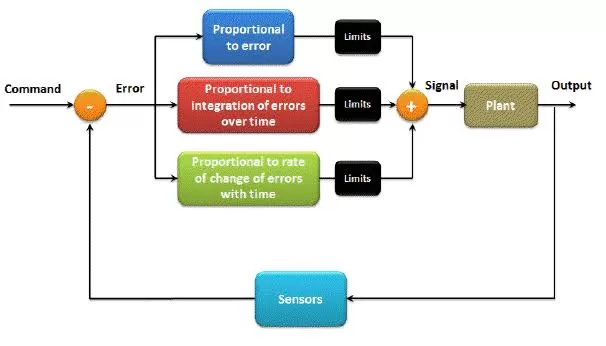
A PID controller consists of three components: proportional, integral and derivative. These components adjust the controller’s output based on different aspects of the error between the setpoint and the process variable.
Proportional Control:
In proportional control, the controller’s output is directly proportional to the error. A proportional gain (Kp) adjusts the output, but too high or too low values can lead to instability or inadequate response.
Integral Control:
Integral control adjusts the controller’s output based on the accumulated error over time. An integral gain (Ki) determines the output, with excessively high or low values resulting in sluggish response or steady-state error.
Derivative Control:
Derivative control adjusts the controller’s output based on the rate of change of the error. A derivative gain (Kd) affects the output and extreme values can introduce sensitivity to noise or slow response.
PID Controller Tuning Methods:
Several methods exist for tuning a PID controller, including Ziegler-Nichols, Cohen-Coon and trial and error. This discussion focuses on the trial and error method, which is simple for beginners.
Trial and Error Method:
The trial-and-error method involves iterative adjustment of Kp, Ki, and Kd gains to meet desired criteria. The basic steps are as follows:
1. Set gains to zero initially.
2. Increase Kp until oscillation occurs.
3. Decrease Kp to reduce oscillation amplitude.
4. Increase Ki until steady-state error is eliminated.
5. Increase Kd for quick response without overshoot.
Additional Considerations:
It is essential to record tuning parameters and adjust them as needed based on process changes. Testing the system under different conditions is vital to ensure stability and robustness.
PID controller tuning is a crucial skill in industrial automation. The trial and error method, with its basic steps and additional considerations, provides a simple yet effective approach for beginners to achieve optimal tuning.

Controllers and Indicators

Allen‑Bradley PLC Systems
Automation

Delta DOP HMI









- About Cables, Use and Types
 The world of cables – from power to data, unravel the manufacturing process and understand their vital role in our tech-driven lives.
The world of cables – from power to data, unravel the manufacturing process and understand their vital role in our tech-driven lives. - Industrial Automation and Types
 Minimize human interference and optimize product quantity and quality with Automation. Explore fixed, programmable, and flexible types
Minimize human interference and optimize product quantity and quality with Automation. Explore fixed, programmable, and flexible types - Industry 4.0 Revolution
 Industry 4.0: Revolutionizing manufacturing with advanced technologies, automation, data-driven insights, and interconnected cyber-physical systems.
Industry 4.0: Revolutionizing manufacturing with advanced technologies, automation, data-driven insights, and interconnected cyber-physical systems. - Sensors: Detecting the Environment
 In the vast world of industrial manufacturing, where machines hum and factories buzz with activity, there exists a silent hero …
In the vast world of industrial manufacturing, where machines hum and factories buzz with activity, there exists a silent hero … - Motor Drives ( VFD and Servo )
 Industrial manufacturing, the powerhouse behind our everyday gadgets and machinery, relies on a fascinating duo known as Variable Frequency Drives …
Industrial manufacturing, the powerhouse behind our everyday gadgets and machinery, relies on a fascinating duo known as Variable Frequency Drives … - Automation Type- PLC, SCADA, DCS & MES
 In the vast realm of Industrial Manufacturing, automation plays a pivotal role in streamlining processes, enhancing efficiency, and ensuring seamless …
In the vast realm of Industrial Manufacturing, automation plays a pivotal role in streamlining processes, enhancing efficiency, and ensuring seamless … - Industrial Valves: Fluids Control
 In the vast world of Industrial Manufacturing, a key player in the seamless operation of machinery is often overlooked—the humble …
In the vast world of Industrial Manufacturing, a key player in the seamless operation of machinery is often overlooked—the humble … - Control Valves: To Control Process System
 In the vast world of Industrial Manufacturing, where machines hum and factories buzz with activity, one crucial player in the …
In the vast world of Industrial Manufacturing, where machines hum and factories buzz with activity, one crucial player in the … - Switches: Types and Uses
 In the vast world of Industrial Manufacturing, switches play a pivotal role in controlling various processes and ensuring smooth operations. …
In the vast world of Industrial Manufacturing, switches play a pivotal role in controlling various processes and ensuring smooth operations. … - Flow Meters – A Measurement Instrument
 Flow meters are devices used to measure the rate at which fluids flow through pipes or conduits. Its main purpose …
Flow meters are devices used to measure the rate at which fluids flow through pipes or conduits. Its main purpose … - Earthing and It’s Types
 When it comes to keeping things safe in the big factories where they make all sorts of things, there’s something …
When it comes to keeping things safe in the big factories where they make all sorts of things, there’s something … - Electric Motors and Their Types
 Electric motors play a major role in the heart of industrial manufacturing, powering a wide array of machinery. Let’s delve …
Electric motors play a major role in the heart of industrial manufacturing, powering a wide array of machinery. Let’s delve …